
Cayley Graphs and Pretty Things
A fun approachable introduction to Cayley Graphs (and a little bit of group theory), and a writeup to this little web widget I made
I recently made a little web-widget to plot Cayley Graphs of over 6000 finite groups because they look pretty.
And they are pretty, right? Above is the plot of the cayley graph of a very well-known group $A_5$. For all such diagrams in this post, feel free to zoom, pan and rotate the plots.
Wait what are Cayley Graphs?
In short, Cayley Graphs are graphs, and by that I mean a bunch of vertices connected by lines, that encode, rather inefficiently, the abstract structure of a Group.
A Group on the other hand is, informally, a non-empty set whose elements are 'symmetrically related' to each other. Groups are very fundamental objects in Mathematics and appear everywhere in Mathematics. The symmetries of a particular group are somewhat reflected in the symmetries of its cayley graph.
While a group's cayley graph encodes the entire structure of a group, it does so rather inefficiently and it's often easier to study groups abstractly. However, I think they are pretty, and there are a few group-theoretic concepts that present themselves naturally in cayley graphs.
This post will cover some intuition about Groups, and discuss informally some classes of groups to appreciate cayley graphs, and you can also try plotting other groups in my web-widget. In particular, this post will cover Rotation Groups, Direct and Semi-direct products. I'm particularly proud of the discussion on semi-direct products as it's, to my knowledge, a new way to introduce the subject.
What are groups?
Here's a description of a group:
A group $G$ is a non-empty set of elements and a binary operation $\cdot$ such that for any $a,b,c \in G$ the following holds
- Associativity: $(a \cdot b) \cdot c = a \cdot (b \cdot c)$
- Identity: There exists an element $e \in G$ such that $a \cdot e = e \cdot a = a$. In other words, $e$ doesn't do anything when multiplied with another element.
- Inverse: There exists an element denoted as $a^{-1}$ such that $a \cdot a^{-1} = a^{-1} \cdot a = e$. In other words, $a^{-1}$ reverses what $a$ does, since $a^{-1} \cdot a \cdot b = e \cdot b = b$.
Where a binary operation is simply some operation that takes in two elements of $G$ and spits out another element of $G$. Note that we do not require $a \cdot b = b \cdot a$. This property of being able to “flip” the order of arguments is called Abelian.
If a group $G$ has a finite number of elements, I'll call it a finite group. Otherwise, it's an infinite group.
For brevity I would sometimes omit the $\cdot$, so $a \cdot b$ might be written as simply $ab$.
This description can apply to a whole bunch of things. A classic example is the integers $\mathbb{Z}$ with the binary operation $+$. For any integers $a,b,c$, we have:
- $(a + b) + c = a + (b + c)$
- $0 + a = a + 0 = a$
- $a + (-a) = (-a) + a = 0$
Of course, in this example, $\mathbb{Z}$ is abelian as $a + b = b + a$. There are however groups where this doesn't hold. If you've played Zelda Tears of the Kingdom, you'd have encountered such a group when rotating an object.
In Zelda Tears of the kingdom, you can only rotate vertically and horizontally by 45°. Here's a tip for rotating around the third axis: Rotate all four directions, in order, for a 45° rotation
— chessapig (@chessapigbay) May 17, 2023
→↓←↑ = ↺
→↑←↓ = ↻
This happens because of some pretty neat math
1/🧵 pic.twitter.com/H64RnTcCnf
You're pretty much only able to rotate 45 degrees horizontally and vertically. Denoting $↓,→,↑,←$ to be a 45 degrees rotation towards the direction of the arrow, we can also rotate around the third axis as performed by @chessapig above:
\[→ \; ↓ \; ← \; ↑ \; = \; ↺ \\ → \; ↑ \; ← \; ↓ \; = \; ↻\]Do check out the thread above btw as it discusses this in greater detail.
Notice that the four operations written above omit the brackets. For instance, the brackets in this expression $((→ \; ↓) \; ←) \; ↑$ are extraneous since it doesn't matter how I draw the brackets. This stems from the associativity of 3D rotations.
The set of all rotations accessible by 45 degrees horizontal and vertical rotations form a group $G$ (try to convince yourself that this is true). However, it is not abelian as otherwise, chessapig's rotation trick wouldn't work. This is because we can view $←$ as reversing whatever $→$ does, and similarly for $↓$ for $↑$. In other words, $← = →^{-1}$ and $↑ = ↓^{-1}$, so, we can rewrite the above relations to be:
\[→ \; ↓ \; →^{-1} \; ↓^{-1} \; = \; ↺ \\ → \; ↑ \; →^{-1} \; ↑^{-1} \; = \; ↻\]Now, if this group $G$ is indeed abelian, then we would have for instance,
\[\begin{aligned} → \; ↓ \; →^{-1} \; ↓^{-1} \; &= \; → \; (↓ \; →^{-1}) \; ↓^{-1} \\ &= \; → \; (→^{-1} \; ↓) \; ↓^{-1} \\ &= \; (→ \; →^{-1}) \; (↓ \; ↓^{-1}) \\ &= \; e \; e = e \\ &\ne \; ↺ \end{aligned}\]Since doing nothing ($e$) isn't the same as $↺$, the group isn't abelian!
There's a caveat though; if you were to study the group $G$ accessible by 45 degree horizontal and vertical rotations, you'd soon realise that this group is infinite (if you know some linear algebra, you can try to prove this). However, if you have played the game, which I haven't btw, you'd notice the game only allows you to rotate an object a finite number of ways. This is because the game cheats, snapping the rotation of the object to the closest of a finite number of possibilities. Hence, the rotations as implemented in the game do not actually form a group.
This group $G$ is a subgroup (i.e., a subset that also forms a group with the same binary operation of $G$) of an infinite group known as $\mathrm{SO}(3)$, the set of all possible 3D rotations. We'll be encountering finite subgroups of $\mathrm{SO}(3)$ later in this post because they have particularly interesting Cayley graphs.
In this case, every element of $G$ is some combination of $→$ and $↓$ and their inverses. We say that $G$ is generated by the elements $→$ and $↓$.
In general, we can always find a subset of any group $G$ that generates $G$. In particular, finite groups have finite sets of generators. However, some infinite groups have finite sets of generators too. For instance, $\mathbb{Z}$ is generated by $1$.
What's a group's Cayley Graph?
Let's suppose a group $G$ is generated by three elements $a,b,c \in G$. Every element of $g$ can be written as a combination of $a,b,c$, for instance, $g = abbc$. Note that because of associativity I can omit the brackets. We can think of “reaching” $g$ from $e$ via successive applications of left multiplication by $a,b,c$:
\[e \xrightarrow{c} c \xrightarrow{b} bc \xrightarrow{b} bbc \xrightarrow{a} abbc\]Every element of $G$ can be thought of as a “path” from $e$, where each step involves taking one of the paths, $a,b$ or $c$. Of course, this path would be dependent on the choice of the set of generators $a,b,c$. Note that this “path” description of elements in a group $G$ only makes sense because of the associativity of the binary operation.
In finite groups, a path will eventually lead back to an element that has already been encountered. For instance, in a group $C_5$, there exists a single generator $g \in C_5$ such that $C_5 = \{e, g^1, g^2, g^3, g^4\}$. In this case, every path has to loop back to the identity $e$:
\[e \xrightarrow{g} g^1 \xrightarrow{g} g^2 \xrightarrow{g} g^3 \xrightarrow{g} g^4 \xrightarrow{g} e\]This “looping” behaviour is why $C_5$ is called a cyclic group. There are in general, cyclic groups of $n \in \mathbb{Z}$ elements denoted as $C_n$ consisting of the elements $\{g^i \mid i \in \mathbb{Z}, \; 0 \le i < n\}$, where $g \in C_n$ is a generator of $C_n$. There is also an infinite cyclic group, which is basically the group of integers $\mathbb{Z}$ described above (and generated by $1$).
Suppose we have multiple generators. We can represent left multiplication by each generator as a path with a unique colour. An arrow marks the direction of the path.
When we have two arrows pointing end-to-end, such as when we have $e \xrightarrow{g} g \xrightarrow{g} e$, we can omit the arrow's direction.
The resulting graph is what is known as a Cayley Graph of a group. Each vertex on the graph is a unique element of the group, and each edge extending from a vertex represents a “path” from one vertex to another via left multiplication of a generator.
You might immediately notice that Cayley graphs tend to be rather symmetrical. This stems from the structure of groups. Firstly, every vertex has exactly one path per colour going away from the vertex, and one path per colour going into the vertex.
The reason why the paths have to be “balanced” in such a way is because of the existence of inverses of every element in a group.
Suppose we have the path $a \xrightarrow{g} b$. Another way to write this is that $ga = b$. At the same time, since $g^{-1}$ exists, there's an element that can be written as $b' = g^{-1} a$. Since $gb' = g g^{-1} a = a$, we have the following:
\[b' \xrightarrow{g} a \xrightarrow{g} b\]Hence, a path away from a vertex is always accompanied by a path toward the vertex. You can similarly convince yourself that the converse is true, that a path towards a vertex is always accompanied by a path away from the vertex.
These constraints on the paths that can be drawn between the vertices of a Cayley Graph are pretty restrictive and forces the graph to look symmetrical. Try it yourself: Start with 5 vertices, and try to draw paths that conform to these rules. (Challenge: Proof that any path you draw will always end up in a loop of 5 vertices. This is another way of saying that a group with 5 elements must be cyclic).
Do note that the Cayley graph for a group might not look unique, and is highly dependent on the choice of generators.
Rotation Groups
Say you start with a square and consider the set of rotations that fixes the position of the vertices.
The rotations consist of rotating 0, 90, 180, and 270 degrees. These rotations form a group, the cyclic group $C_4$, generated by 90 degree rotations. This is known as the rotation group of a square, and the Cayley Graph of this rotation group looks exactly like a square:
We can similarly talk about the rotation group of other shapes, like hexagons, which is the set of rotations that fixes the position of the vertices of the shape. These rotation groups are subgroups of the set of all 2D rotations $\mathrm{SO}(2)$, so a natural question is to ask “What are the finite subgroups of $\mathrm{SO}(2)$?”.
It turns out that the finite subgroups of $\mathrm{SO}(2)$ describe the rotation groups of a regular $n$-gon, whose rotation group has the same structure as the cyclic group $C_n$.
Similarly to the square example, the Cayley Graph of the rotation group of a regular $n$-gon does look like said $n$-gon.
Does this observation extend to 3D? To put it precisely, are the finite subgroups of $\mathrm{SO}(3)$ rotation groups of some 3D shape, and do the Cayley Graphs of these rotation groups resemble the underlying 3D shape?
Firstly, $\mathrm{SO}(2)$ is contained in $\mathrm{SO}(3)$, i.e., the set of 2D rotations can be found in the set of 3D rotations. So the finite subgroups of $\mathrm{SO}(3)$ would contain the cyclic groups $C_n$. In addition, $\mathrm{SO}(3)$ contains the dihedral groups $D_n$, the set of rotations and reflections of a regular $n$-gon. This is because we can perform a “flip” (effectively perform a reflection by an axis) of a 2D shape by flipping it through the third dimension.
However, these subgroups are kinda boring. They mostly take place in a single plane of existence (a 2D plane), and don't really 'fully utilise' 3D space.
It turns out there are exactly $3$ more finite subgroups of $\mathrm{SO}(3)$ that don't fit into any of the above categories. These are
- $A_4$: the group of tetrahedral rotations
- $S_4$: the group of cube and octohedron rotations
- $A_5$: the group of icosahedral and dodecahedral rotations
Note: The plots of the groups above look different from what you'll see on my other site. This is because I'm using a different set of generators. In particular:
- $A_4$: If the other site used $(a,b,c)$, I used $(ca, b, c)$ here.
- $S_4$: If the other site used $(a,b,c,d)$, I used $(a,db, dc, d)$ here.
- $A_5$: If the other site used $(a,b)$, I used $(a^2, b)$ here.
The polyhedra for which these rotation groups describe the rotations that fix their vertices are precisely every convex regular polyhedra in 3D, or the Platonic Solids (thanks wikipedia).
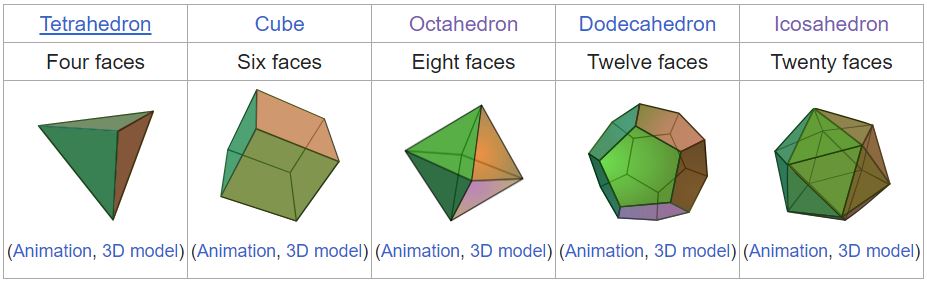
In addition, duals (one replaces a polyhedra's vertices with faces to get its dual) share the same rotation group:
- The regular tetrahedron is its own dual
- The cube and octahedron are duals.
- The icosahedron and dodecahedron are duals.
Here's an animation by @Toby Schachman showing how an octahedron transforms into its dual (the cube):
Here's an animation showing a cube transforming into an octahedron and back again. pic.twitter.com/FuNWOQF61m
— Toby Schachman (@mandy3284) October 28, 2019
The shape that happens in between the octahedron and the cube, is a truncated octahedron, which looks precisely like the Cayley Graph of $S_4$! Furthermore, the Cayley Graph of $A_4$ looks like a truncated tetrahedron. $A_5$ in particular exhibits both an icosahedron and dodecahedron simply by changing the lengths of the edges:
Direct Products
Direct products are a method of constructing a larger group from two smaller groups, denoted as $A \times B$. You've likely come across direct products in some form: If $\mathbb{R}$ is the number line (say an $x$-axis), then $\mathbb{R}^2$ is the $xy$-plane. In this case, $\mathbb{R}^2$ is the direct product $\mathbb{R} \times \mathbb{R}$.
Direct products $A \times B$ can be thought of as creating a copy of $A$ for each element in $B$, and vice-versa ($A \times B$ = $B \times A$). In the axis-plane example above, we are duplicating the $x$-axis for each element of the $y$-axis, forming a plane. We represent an element in $A \times B$ as a tuple $(a,b) \in A \times B$ where $a \in A$ and $b \in B$.
Elements in $A \times B$ interact component-wise. For the case of groups, $A$ and $B$ are groups and $(a,b) \cdot (a', b') = (a \cdot a', b \cdot b')$, where the $\cdot$ in the right-hand side is the binary operator in the groups $A$ and $B$. You can try to convince yourself that $A \times B$ also forms a group.
The Cayley Graphs of direct products exhibit this intuition. For instance, consider the direct product of two cyclic groups $C_{4} \times C_{8}$
You get this glorious donut shape. Each $C_{4}$ (the smaller ring) is duplicated for each element of $C_{8}$ (the larger ring forming the donut).
In a group $A \times B$, we have $(a', e) \cdot (a, b) = (a'a, b)$ where $e$ is the identity of $B$. We can think of multiplying by $(a', e)$ as traveling from the element $(a,b)$ to $(a'a, b)$. This can be seen as moving into a different element within the copy of $A$ associated with the element $b \in B$. However, we can also think of this from $B$'s perspective: We are traveling from the element $b$ within the copy of $B$ associated with the element $a \in A$, to the element $b$ within a different copy of $B$ associated with the element $a'a \in A$. I.e., we're still in the same spot $b$ but we've just changed “universe” ($a \rightarrow a'a$).
In the case of the Cayley graph of $C_{4} \times C_{8}$, we have a generator for $A = C_{4}$ which we denote as $(a', e)$, and similarly a generator for $B = C_{8}$, denoted as $(e, b')$. These generators correspond to the two edges of different colours.
In the Cayley Graph of $A \times B$, all copies of a fixed element $a \in A$ are strung together by generators in $B$, and similarly for all elements of $b \in B$. For $C_{4} \times C_{8}$, this forms the donut shape.
Try plotting other direct products and play with the edge lengths and see if you can spot this pattern.
Semi-direct Products
Direct products are a special case of a more general way of constructing larger groups from smaller ones: Semi-direct products.
Semi-direct products introduce an additional construct to direct products, which we'll call a twist and denote with the symbol $\psi$. We'll denote the semi-direct product of groups $A$ and $B$ with the twist $\psi$ as the group $G = A \rtimes_\psi B$. What $\psi$ is precisely will be described later. The structure of $G$ is now dependent on $A$, $B$, and the choice of the twist $\psi$. We'll eventually show that a 'trivial' choice of $\psi$ results in a direct product. First, I'll illustrate the concept of a twist via Cayley Graphs.
It's best to see the twist by example. Consider the Cayley Graph of two groups, $C_6 \times C_2$ and $C_6 \rtimes_\phi C_2$ (another name for this is $D_6$):
They look the same, except for the direction of the arrows. In $C_6 \times C_2$, both rings have arrows pointing in the same direction, but in $D_6$ that's not the case.
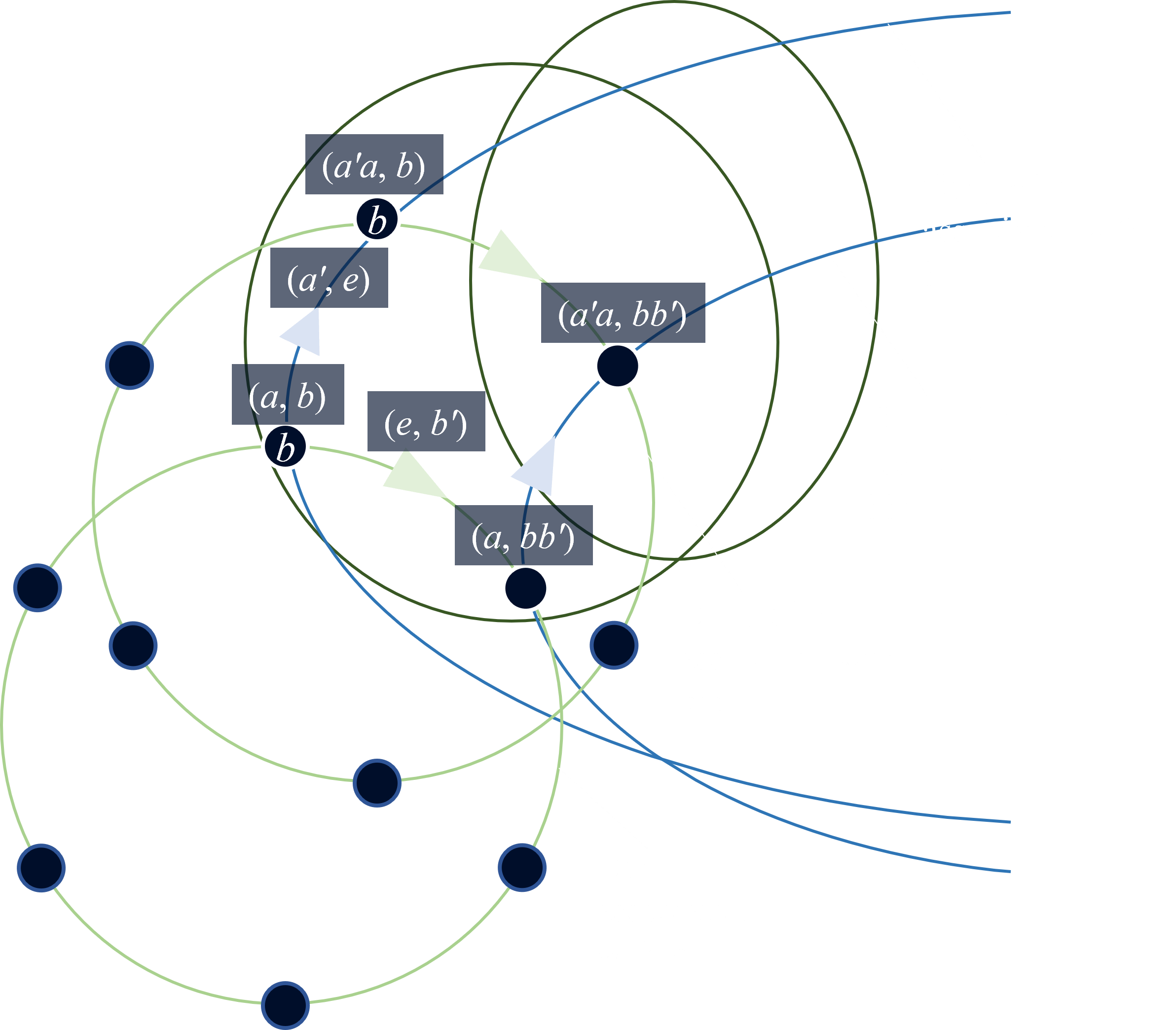
One way to understand what's going on here is to view the twist $\psi$ as changing the rules of how one travels across different copies of $A$ (in this case it's $C_6$). Instead of traveling to the same element upon changing copies of $A$, i.e., $(e, b')\cdot(a,b) = (a,b'b)$ (as in the case of direct products), we travel to a different element of $A$, i.e., $(e,b') \cdot (a,b) = (x, b'b)$ where $x$ need not equal to $a$. This “twist” is illustrated below:
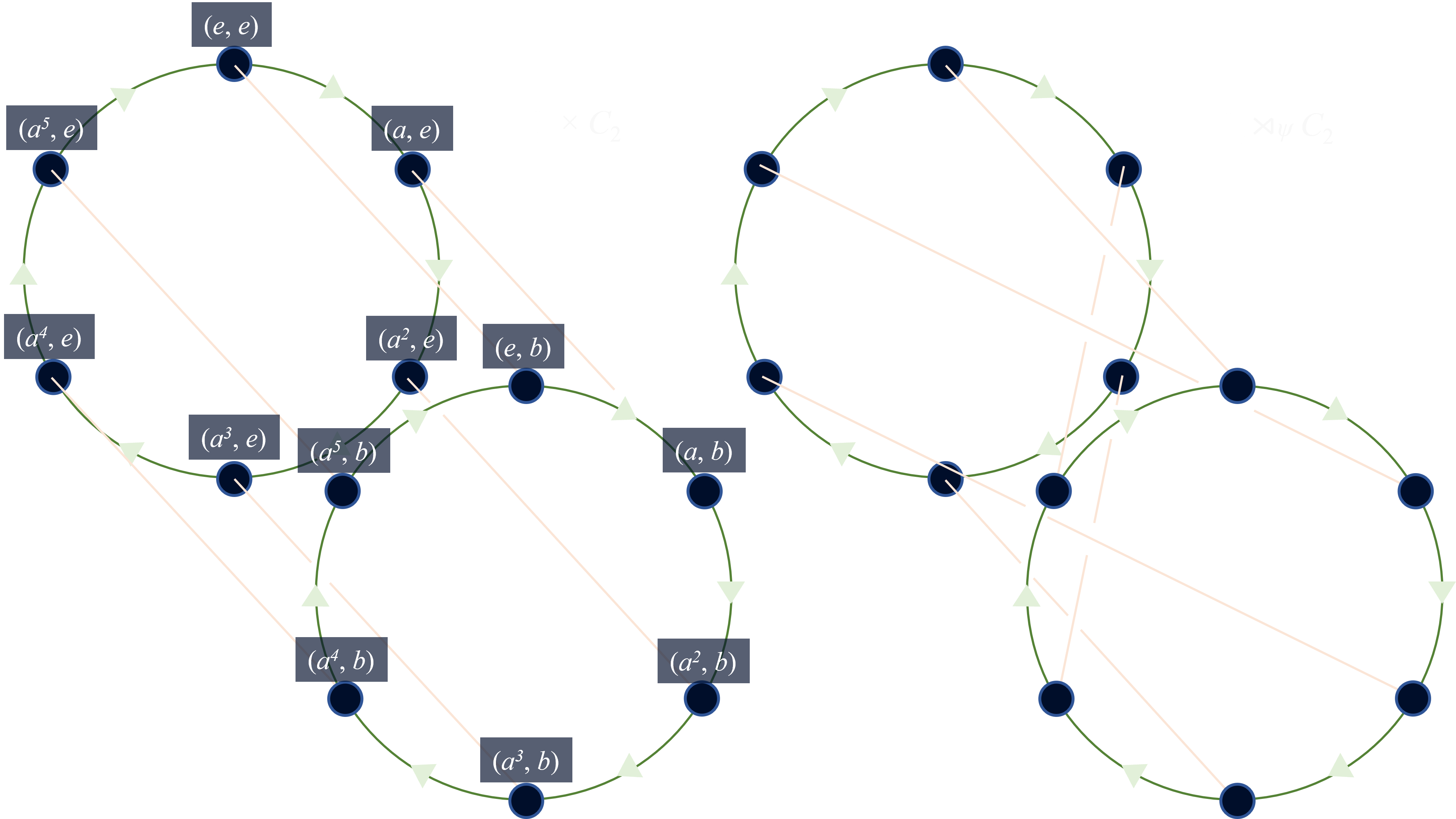
Notice that in the second image, one can move the edges and nodes around to form the Cayley plot of $D_6$.
We'd see later that the group structure of $A \rtimes_\psi B$ constraints what $\psi$ can look like, to the point where the two illustrated twists are the only two possible choices of $\psi$ for $C_6 \rtimes_{\psi} C_2$.
Let's try to derive semi-direct products as a generalisation of direct products from scratch. I represent an element of $G = A \rtimes_\psi B$ similarly to direct products: as a tuple $(a,b)$ where $a \in A$ and $b \in B$. I'll refer to $a$ as the $A$-component of $(a,b)$ (and similarly for the $B$-component). As we attempt to generalise direct products into semi-direct products, we will attempt to generalise the group operation of $G$.
Let's embed the group operation of $A$ into $G$. We require that $(a', e) \cdot (a,b) = (a'a,b)$, i.e., the left multiplication with elements with no $B$-component is equivalent to the group operation of $A$. Left multiplication with $(a',e)$ can be interpreted as traveling within the same copy of $A$. When doing so, we respect the group operations of $A$ (similar to direct products).
Similarly, let's also embed the group operation of $B$ into $G$ by requiring that $(a,b) \cdot (e,b') = (a, bb')$, i.e., the right multiplication with elements with no $A$-component is equivalent to the group operation of $B$. This is my interpretation of the prefix “semi” in “semi-direct product”:
\[\begin{aligned} (a', e) \cdot (a,b) &= (a'a,b) &\text{rule 1.1} \\ (a,b) \cdot (e,b') &= (a, bb') &\text{rule 1.2} \end{aligned}\]Note that a special case of the above rules is that
\[\begin{aligned} (a',e)\cdot(a,e) &= (a'a,e) \\ (e,b)\cdot(e,b') &= (e,b'b) \end{aligned}\]In other words, the multiplication of elements with no $B$-component is equivalent to simply multiplying elements in $A$, and vice-versa. This shows that both $A$ and $B$ are embedded inside $G$ as subgroups.
Let's say we wanna travel from $(a,b)$ into a different copy of $A$ via left-multiplication with $(e,b')$. Respecting the multiplication in the $B$-component, we should end up in the copy of $A$ associated with the element $b'b$, but let's remove the assumption (as in the case of direct products) that we end up in the same element $a$. So let $(e,b') \cdot (a,b) = (x, b'b)$, where $x \in A$. We write $x = f_{b'}(a)$.
\[\begin{aligned} (e,b') \cdot (a,b) &= (f_{b'}(a), b'b) &\text{rule 2} \end{aligned}\]As we vary $a$ across all elements of $A$, we would expect $x$ to vary across all elements in $A$, i.e., when we travel to another copy of $A$, it should be possible to land in any element of $A$ by starting in a different element of $A$ in the previous copy. Another way to describe this is that $f_{b'}: A \rightarrow A$ is bijective.
We want our choice of $f_{b'}$ to ensure that $G$ is still a group, so we must have the following chain of equalities hold:
\[\begin{aligned} &(f_{b'}(a') \cdot f_{b'}(a), b'b) \\ &= (f_{b'}(a'), e) \cdot (f_{b'}(a), b'b) & \text{rule 1.1} \\ &= (f_{b'}(a'), e) \cdot [\;(e,b')\cdot(a,b) \;] & \text{rule 2} \\ &= [\; (e,b')\cdot(a',b'^{-1}) \;] \cdot [\;(e,b')\cdot(a,b) \;] & \text{rule 2} \\ &= (e,b') \cdot [\;[\; (a',b'^{-1})\cdot(e,b') \;] \cdot (a,b)\;] &\text{associativity} \\ &= (e, b')\cdot[\; (a',e)\cdot(a,b)\;] &\text{rule 1.2}\\ &= (e, b')\cdot (a'a, b) &\text{rule 1.1} \\ &= (f_{b'}(a'\cdot a), b'b) \end{aligned}\]In particular, this chain of equalities show that $f_{b'}$ is forced to satisfy the following constraint should $G$ be a group: For all $a,a' \in A$ and $b' \in B$,
\[\begin{aligned} f_{b'}(a') \cdot f_{b'}(a) &= f_{b'}(a'a) %&\text{rule 3} \end{aligned}\]This property of $f_{b'}$ can be seen as preserving the group operation of $A$, i.e., the order in which we perform the mapping $f_{b'}$ and the group multiplication in $A$ does not matter.
Mappings that satisfy such a constraint are called homomorphisms. In particular, $f_{b'}$ is both a bijection from $A$ into itself and a homomorphism. Such maps are called automorphisms of $A$, and you can think of such maps as simply renaming the elements of $A$. The set of automorphisms of $A$ forms a group $\mathrm{Aut}(A)$, where the identity of $\mathrm{Aut}(A)$ is the “do-nothing” function $\mathrm{id}(x) = x$, and the group operation $\circ$ is function composition, i.e., for $f,g \in \mathrm{Aut}(A)$, $(f \circ g)(x) = f(g(x)) \in \mathrm{Aut}(A)$. (Try verifying this for yourself).
We should also determine how $f_b$ of different $b \in B$ should interact:
\[\begin{aligned} &(f_{b'b}(a), b'b) \\ &= (e, b'b)\cdot (a,e) &\text{rule 2} \\ &= [\;(e, b')\cdot(e, b)\;]\cdot(a, e) &\text{rule 1.2} \\ &= (e, b')\cdot[\;(e, b)\cdot(a, e)\;] &\text{associativity} \\ &= (e, b') \cdot (f_b(a), b) &\text{rule 2} \\ &= (f_{b'}(f_b(a)), b'b) &\text{rule 2} \\ &= ((f_{b'} \circ f_b)(a), b'b) &\text{operation in }\mathrm{Aut}(A) \end{aligned}\]In particular, we must have for all $b,b' \in B$, $f_{b'b} = f_{b'} \circ f_b$. Does this look familiar? Let $\psi: B \rightarrow \mathrm{Aut}(A)$ defined by $\psi(b) = f_b$. I can rewrite the above constraint to:
\[\begin{aligned} \psi(b'b) &= \psi(b')\circ \psi(b) %&\text{rule 4} \end{aligned}\]$\psi$ is a homomorphism from $B$ to $\mathrm{Aut}(A)$! This is in fact, the twist $\psi$ I alluded to above.
Lastly, we should derive the group operation of $G$ in terms of $\psi$:
\[\begin{aligned} & (a',b')\cdot(a,b) \\ &= [\; (a',e)\cdot(e,b') \;]\cdot(a,b) &\text{rule 1.1 or 1.2} \\ &= (a',e) \cdot [\;(e,b')\cdot(a,b) \;] &\text{associativity} \\ &= (a',e) \cdot (f_{b'}(a), b'b) &\text{rule 2} \\ &= (a'f_{b'}(a), b'b) &\text{rule 1.1} \\ &= (a' \psi(b')(a), b'b) &\text{definition of }\psi \\ \\ &\implies (a',b')\cdot(a,b) = (a' \; \psi(b')(a), b'b) \end{aligned}\]It turns out, this description of the group operation of $G$ is sufficient to prove that $G$ is indeed a group (try it!).
In summary, our choice of asserting that rule 1.1 and 1.2 holds forces us to the following definition of semi-direct product:
Let $G$ be a semi-direct product of $A$ and $B$ with respect to the twist $\psi$, where $\psi: B \rightarrow \mathrm{Aut}(A)$ is a homomorphism. We denote $G$ as $G = A \rtimes_\psi B$, and define the group operation on $G$ to be
\[(a',b')\cdot(a,b) = (a' \; \psi(b')(a), b'b)\]
Note that if we define $\psi$ to map all of $B$ into the do-nothing function $\mathrm{id}$, we would have
\[\begin{aligned} &(a',b')\cdot(a,b) \\ &= (a'\;\psi(b')(a), b'b) \\ &= (a'a, b'b) \end{aligned}\]And our semi-direct product reduces into a direct product. Hence direct products are simply a special case of semi-direct products.
Unfortunately, not all twists are that easily visualisable. Take for instance $C_{5} \rtimes_{\psi} C_{8}$ where the twist causes the donut to look really weird:
End
If you're interested in more useful ways to visualise groups, I have another post on Visualising Homomorphisms which gives an intuition for the isomorphism theorems.